互补滤波概述
20 Apr 2017 | 算法
概述
互补滤波和卡尔曼滤波通常与MPU6050联系在一起。由于陀螺仪是积分计算角度,因此任意时刻的微小误差将会随着时间的推移在积分过程中被放大,导致陀螺仪数据产生漂移,因此长时间内陀螺仪的可信度较低。因此在实际应用中我们需要进行滤波。
但是卡尔曼滤波太复杂了,在下数学太差,没看懂。所以决定还是看看互补滤波吧。
互补滤波结合加速度计的准确性,和陀螺仪噪声小的特性,互取所长。
盗图一张:

互补滤波器,就是上面积分器和低通滤波器的变种结合体。
简单地说,就是通过 低通滤波器 过滤掉短期波动,让长期变化得以保留。让信号一点一点起作用而不是一下子猛烈作用,即在时间范围上取平均。积分器 通过对该角度的积分得到系统运行以来的角度。而 高通滤波器 除去长期变化,保留短暂变化,加于陀螺仪,可以滤掉温漂;
公式
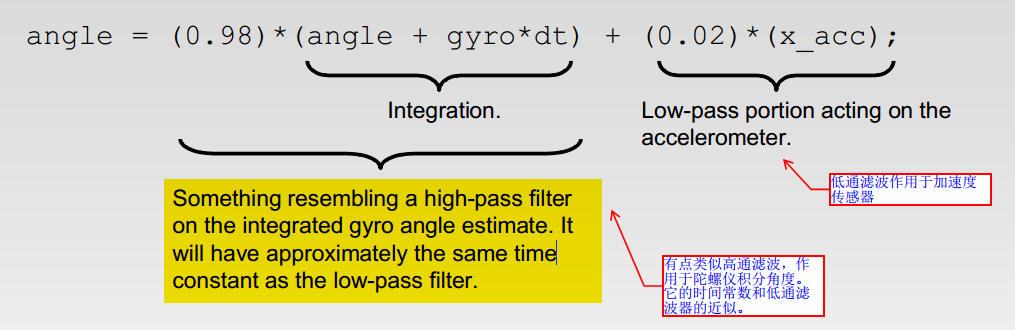
其中,angle为当前角度,gyro为陀螺仪角速度,dt为计算周期。gyro*dt 得到计算周期时间段内通过的角度,通过对该角度的积分(不断累加),得到系统运行以来的角度。x_acc为当前加速度计换算后的角度值。对x_acc进行低通滤波,让加速度计的长期变化得以保留,angle能追踪加速度计的长期变化。
- 这里,0.98和0.02为自己取的系数,实际应用时需根据实际情况调参。
时间常数
这个时间常数确定了陀螺仪和加速度计的信任边界。信号时间周期低于dt时,陀螺仪占主导地位,加速度计的噪声除掉;信号时间周期大于dt时,加速度计的角度平均值就占据主导地位,有温漂的陀螺仪可以站一边去。
代码示例
float Angle_gy; //前一时刻的积分角度
float Angle_A,Angle_B; //X.Y方向加速度暂存
float Angle_X,Angle_Y; //最终倾角X.Y
/* 加速度计的返回值暂存变量 */
float JSDx = 0;
float JSDy = 0;
float JSDz = 0;
/* 陀螺仪的返回值暂存变量 */
float TLYx = 0;
float TLYy = 0;
float TLYz = 0;
//互补滤波
//-------------------------------------------------------
//-------------------------------------------------------
float bias_cfx;
float angle_dotx; //外部需要引用的变量
const float dtx=0.0048;
//-------------------------------------------------------
void complement_filterX(float angle_m_cfx,float gyro_m_cfx)
{
bias_cfx*=0.0001; //陀螺仪零飘低通滤波;500次均值;0.998
bias_cfx+=gyro_m_cfx*0.009; //0.002
angle_dotx=gyro_m_cfx-bias_cfx;
Angle_X=angle_m_cfx*0.02 + (Angle_X+angle_dotx*dtx)*0.98;
//加速度低通滤波;20次均值;按100次每秒计算,低通5Hz;0.90 0.05
}
//-------------------------------------------------------
//-------------------------------------------------------
float bias_cfy;
float angle_doty; //外部需要引用的变量
const float dty=0.0048;
//-------------------------------------------------------
void complement_filterY(float angle_m_cfy,float gyro_m_cfy)
{
bias_cfy*=0.0001; //陀螺仪零飘低通滤波;500次均值;0.998
bias_cfy+=gyro_m_cfy*0.009; //0.002
angle_doty=gyro_m_cfy-bias_cfy;
Angle_Y=angle_m_cfy*0.02 + (Angle_Y+angle_doty*dty)*0.98;
//加速度低通滤波;20次均值;按100次每秒计算,低通5Hz;0.90 0.05
}
void Angle_Calcu(void)
{
float temp1,temp2;
/****************************Y方向**************************/
//加速度(角度)
JSDx = getAccX(); //读取X轴加速度
JSDy = getAccY(); //读取Y轴加速度
JSDz = getAccZ(); //读取Z轴加速度
temp1=sqrt((JSDx*JSDx+JSDz*JSDz))/JSDy;
JSDy=atan(temp1)/3.1415926*180;
if(JSDy>0) Angle_B=JSDy-89.9;
if(JSDy<0) Angle_B=JSDy+90.1;
//陀螺仪(角速度)
TLYx = getGyroX(); //静止时角速度Y轴输出为-30左右
TLYx = (TLYx)/16.384; //去除零点偏移,计算角速度值,负号为方向处理
//// Angle_gy = Angle_gy + TLYy*0.0056; //角速度积分得到倾斜角度.
/****************************X方向**************************/
//加速度(角度)
JSDx = getAccX(); //读取X轴加速度
JSDy = getAccY(); //读取Y轴加速度
JSDz = getAccZ(); //读取Z轴加速度
temp2=sqrt((JSDy*JSDy+JSDz*JSDz))/JSDx;
JSDx=atan(temp2)/3.1415926*180;
if(JSDx>0) Angle_A=JSDx-87.2;
if(JSDx<0) Angle_A=JSDx+92.8;
//陀螺仪(角速度)
TLYy = getGyroY(); //静止时角速度Y轴输出为-30左右
TLYy = -(TLYy)/16.384; //去除零点偏移,计算角速度值,负号为方向处理
//// Angle_gy = Angle_gy + TLYy*0.0056; //角速度积分得到倾斜角度.
//-------互补滤波-----------------------
//补偿原理是取当前倾角和加速度获得倾角差值进行放大,然后与
//陀螺仪角速度叠加后再积分,从而使倾角最跟踪为加速度获得的角度
//0.5为放大倍数,可调节补偿度;0.005为系统周期5ms
Angle_X = Angle_X + (((Angle_A-Angle_X)*0.5 + TLYy)*0.0054); //X方向
Angle_Y =Angle_Y + (((Angle_B-Angle_Y)*0.5 + TLYx)*0.0054); //Y方向
}
comments powered by Disqus